Новости и события
СРОЧНО!!! Освободилось одно место.
Индонезия. Малые Зондские острова. о.Комодо. 15 сентября 2014г.С Великим праздником!!! С Днём победы Великого народа над фашистской мразью!!!
День Победы – пожалуй, самый важный исторический праздник, который объединяет не только народы России, но и выходцев из стран – бывших республик СССР.Баренцево море. 31 июля – 7 августа 2014.
Уважаемые дайверы! Продолжаем вас радовать и удивлять новыми необычными дайв-путешествиями.Наш инструктор Ольга Золкина - MSDT!!!
Решением Профессиональной Ассоциации Дайв-Инструкторов (PADI), Золкиной Ольге Петровне присвоено почетное звание Master Scuba Diver Trainer (MSDT)Израиль. Красное море. 30марта – 6 апреля.
Приглашаем вас принять участие в третьем клубном выезде на Красное море в г. Эйлат (Израиль).Дайвинг снаряжение б/у
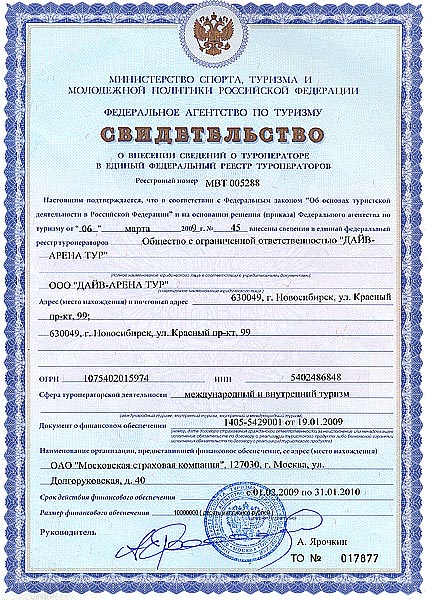
- г/к ж. Water Proof (Lynks и Libra), XL
- компенсатор scubapro top1000
- спарки баллонов от АВМ-1
- Г/к-м Water Proof Silver, жен., р. 6
- авм1 с ремкомлектом
Фото дня от дайв-клуба

Подписка на рассылку новостей



Где толщиномер константа к5 купить
22.05.2016Кисти пловца достигают максимальной скорости во время движения внутрь — в это время она превышает скорость во время захвата более чем в 2 раза. После начала движения рук вперед их скорость начинает снижаться, такое снижение продолжается до момента захвата в следующем цикле гребка. Как и в других способах спортивного плавания, изменения скорости движения кисти отражают изменения скорости движения пловца.
Динамика скорости стоп пловца показана на графике в верхней части рисунка 7.7, область под которым имеет светло-голубой фон. Во время выполнения гребка руками ноги пловца скользят в воде без движения, о чем свидетельствует их скорость, которая в это время равна скорости движения туловища пловца. Подтягивание нот начинается сразу же после завершения толчковой фазы гребка руками, примерно через 0,55 с после начала цикла гребка, и происходит с большой скоростью. Скорость движения стоп достигает примерно 3 м - с 1 перед началом движения в стороны, т. е. выполнением разворота для проведения захвата. Затем движение ног несколько замедляется. Возможно необходимо будет толщиномер константа к5 купить. После начала толчковой фазы скорость движения стоп быстро возрастает и продолжает увеличиваться на протяжении выполнения движения ног — в стороны, назад и вниз, достигая примерно 4 м • с_| в момент полного выпрямления ног. Во время изменения направления движения скорость стоп несколько снижается, а затем снова возрастает до момента завершения движения внутрь примерно через 1,48 с после начала цикла гребка. После окончания фазы отталкивания скорость стоп снижается до скорости тела пловца одновременно с подъемом к поверхности воды в обтекаемое положение для скольжения.
Дилер сафарийных кораблей

{kind=link}